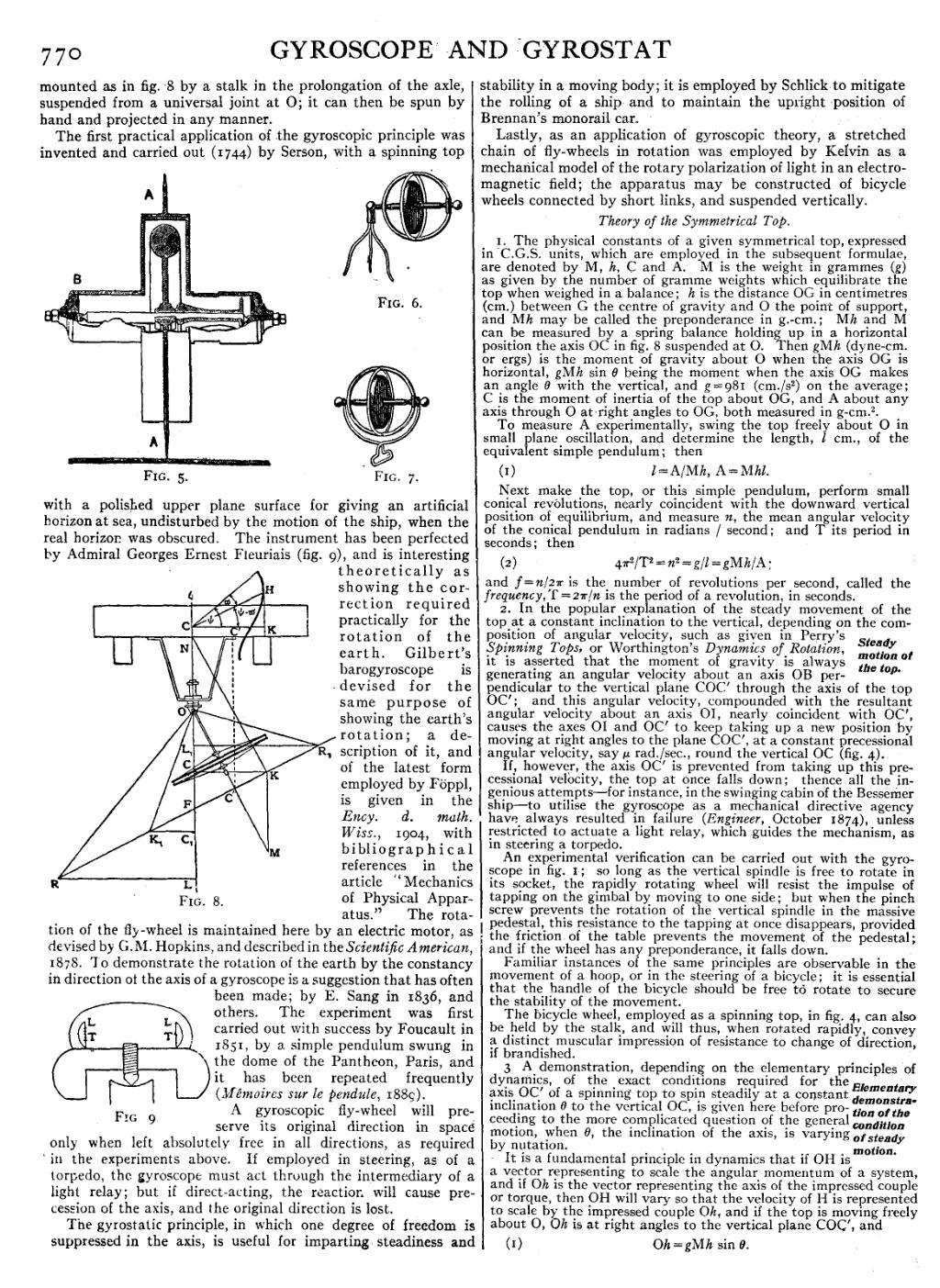
mounted as in fig. 8 by a stalk in the prolongation of the axle,
suspended from a universal joint at O; it can then be spun by
hand and projected in any manner.
|
|



 |
 |
| Fig. 8. | Fig. 9. |
The first practical application of the gyroscopic principle was invented and carried out (1744) by Serson, with a spinning top with a polished upper plane surface for giving an artificial horizon at sea, undisturbed by the motion of the ship, when the real horizon was obscured. The instrument has been perfected by Admiral Georges Ernest Fleuriais (fig. 9), and is interesting theoretically as showing the correction required practically for the rotation of the earth. Gilbert’s barogyroscope is devised for the same purpose of showing the earth’s rotation; a description of it, and of the latest form employed by Föppl, is given in the Ency. d. math. Wiss., 1904, with bibliographical references in the article “Mechanics of Physical Apparatus.” The rotation of the fly-wheel is maintained here by an electric motor, as devised by G. M. Hopkins, and described in the Scientific American, 1878. To demonstrate the rotation of the earth by the constancy in direction of the axis of a gyroscope is a suggestion that has often been made; by E. Sang in 1836, and others. The experiment was first carried out with success by Foucault in 1851, by a simple pendulum swung in the dome of the Pantheon, Paris, and it has been repeated frequently (Mémoires sur le pendule, 1889).
A gyroscopic fly-wheel will preserve its original direction in space only when left absolutely free in all directions, as required in the experiments above. If employed in steering, as of a torpedo, the gyroscope must act through the intermediary of a light relay; but if direct-acting, the reaction will cause precession of the axis, and the original direction is lost.
The gyrostatic principle, in which one degree of freedom is suppressed in the axis, is useful for imparting steadiness and stability in a moving body; it is employed by Schlick to mitigate the rolling of a ship and to maintain the upright position of Brennan’s monorail car.
Lastly, as an application of gyroscopic theory, a stretched chain of fly-wheels in rotation was employed by Kelvin as a mechanical model of the rotary polarization of light in an electromagnetic field; the apparatus may be constructed of bicycle wheels connected by short links, and suspended vertically.
1. The physical constants of a given symmetrical top, expressed in C.G.S. units, which are employed in the subsequent formulae, are denoted by M, h, C and A. M is the weight in grammes (g) as given by the number of gramme weights which equilibrate the top when weighed in a balance; h is the distance OG in centimetres (cm.) between G the centre of gravity and O the point of support, and Mh may be called the preponderance in g.-cm.; Mh and M can be measured by a spring balance holding up in a horizontal position the axis OC in fig. 8 suspended at O. Then gMh (dyne-cm. or ergs) is the moment of gravity about O when the axis OG is horizontal, gMh sin θ being the moment when the axis OG makes an angle θ with the vertical, and g = 981 (cm./s2) on the average; C is the moment of inertia of the top about OG, and A about any axis through O at right angles to OG, both measured in g-cm.2.
To measure A experimentally, swing the top freely about O in small plane oscillation, and determine the length, l cm., of the equivalent simple pendulum; then
Next make the top, or this simple pendulum, perform small conical revolutions, nearly coincident with the downward vertical position of equilibrium, and measure n, the mean angular velocity of the conical pendulum in radians / second; and T its period in seconds; then
and f = n/2π is the number of revolutions per second, called the frequency, T = 2π/n is the period of a revolution, in seconds.
2. In the popular explanation of the steady movement of the top at a constant inclination to the vertical, depending on the composition of angular velocity, such as given in Perry’s Spinning Tops, or Worthington’s Dynamics of Rotation, it is asserted that the moment of gravity is always Steady motion of the top. generating an angular velocity about an axis OB perpendicular to the vertical plane COC′ through the axis of the top OC′; and this angular velocity, compounded with the resultant angular velocity about an axis OI, nearly coincident with OC′, causes the axes OI and OC′ to keep taking up a new position by moving at right angles to the plane COC′, at a constant precessional angular velocity, say μ rad./sec., round the vertical OC (fig. 4).
If, however, the axis OC′ is prevented from taking up this precessional velocity, the top at once falls down; thence all the ingenious attempts—for instance, in the swinging cabin of the Bessemer ship—to utilise the gyroscope as a mechanical directive agency have always resulted in failure (Engineer, October 1874), unless restricted to actuate a light relay, which guides the mechanism, as in steering a torpedo.
An experimental verification can be carried out with the gyroscope in fig. 1; so long as the vertical spindle is free to rotate in its socket, the rapidly rotating wheel will resist the impulse of tapping on the gimbal by moving to one side; but when the pinch screw prevents the rotation of the vertical spindle in the massive pedestal, this resistance to the tapping at once disappears, provided the friction of the table prevents the movement of the pedestal; and if the wheel has any preponderance, it falls down.
Familiar instances of the same principles are observable in the movement of a hoop, or in the steering of a bicycle; it is essential that the handle of the bicycle should be free to rotate to secure the stability of the movement.
The bicycle wheel, employed as a spinning top, in fig. 4, can also be held by the stalk, and will thus, when rotated rapidly, convey a distinct muscular impression of resistance to change of direction, if brandished.
3. A demonstration, depending on the elementary principles of dynamics, of the exact conditions required for the axis OC′ of a spinning top to spin steadily at a constant inclination θ to the vertical OC, is given here before proceeding to the more complicated question of the generalElementary demonstration of the condition of steady motion. motion, when θ, the inclination of the axis, is varying by nutation.
It is a fundamental principle in dynamics that if OH is a vector representing to scale the angular momentum of a system, and if Oh is the vector representing the axis of the impressed couple or torque, then OH will vary so that the velocity of H is represented to scale by the impressed couple Oh, and if the top is moving freely about O, Oh is at right angles to the vertical plane COC′, and